中国科学院软件研究所可信智能系统团队在开源自动驾驶(Self-driving System)平台建设方面取得了进展,构建了开放易用且自主可控的自动驾驶算法开发、测试、仿真与验证平台ISS(https://tis.ios.ac.cn/iss/)。
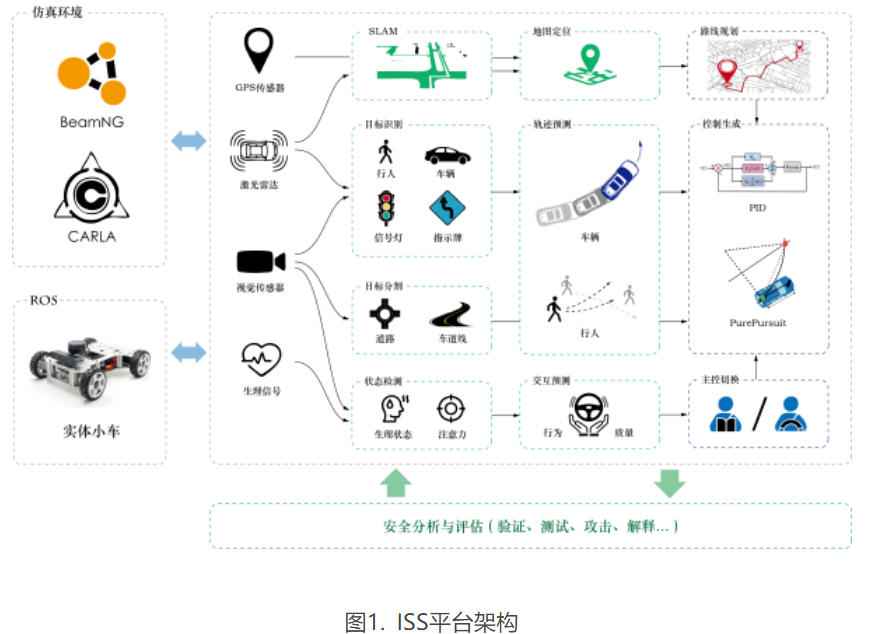
ISS平台基于模块化的框架,以依赖库较少的方式,实现了涵盖自动驾驶全流程(包括感知、建图、定位、预测、规划与控制等)的几十种基准算法(图1)。ISS平台使用简单、易于扩展,可为科研人员开展自动驾驶相关研究提供支撑。
ISS平台体实现了以下六大模块功能。传感器模块:基于CARLA仿真器支持了常用的传感器;感知模块:基于深度学习方法实现了2D检测、2D语义分割、Bev地图生成、3D目标检测等感知任务;预测模块:实现了匀速运动预测和基于Motion Transformer的预测;定位模块:实现了基于激光雷达、惯性测量单位、全球定位系统等的单传感器定位和基于卡尔曼滤波器等过滤器的多传感器融合定位;规划模块:实现了基于Lanelet2的FloodFill路线规划算法、基于规则的行为规划算法、基于Lattice Planner和EM Planner的运动规划算法;控制模块:实现了经典的PID和MPC控制算法。
目前,国防科技大学、西南大学、奥地利数字安全实验室、德国萨尔大学等的科研团队利用ISS平台开展研究。软件所可信智能系统团队后续将对ISS平台各个模块的功能继续进行扩展完善,如加入自动驾驶可解释性分析、安全性验证、物理小车及联合仿真等功能。ISS平台有望成为领域内颇有影响力的开源基础支撑平台,为国内外自动驾驶与可信人工智能等方向的研究团队提供支持。